Model Data Inputs |


|
Model Data Inputs |
|

Input |
Description |
Add |
Click on this button to add a component to the model. You must first highlight the type of component that you want to add in the tree view in the left pane. The provided add dialog depends on the selected component type. |
Remove |
Click on this button to remove the component that is currently highlighted in the left pane from the model. |
Properties |
Click on this button to display the properties of the component that is currently highlighted in the left pane. The provided properties dialog depends on the selected component type. |
Seabed: |
A drop-down menu that allows you to select a Seabed component from a list of all those currently defined in the project. |
Water Depth: |
The depth of water in which the model is located. Units: [m] or [ft] |
Advanced: |
Click on this button to display the Advanced Properties dialog for the Model component. This button is located below the left pane. See the ‘Advanced Options Dialog’ section in this article for more information. |
Support Data: |
A button that allows you to export a summary of vessel and stinger support offsets, as calculated/applied by the user interface when creating the model, to a CSV file for viewing. This button is located below the left hand pane. You get a standard Windows Save As dialog when you invoke this button, which you can then use to save the export CSV file in a desired location before viewing. The format of the file is described in Technical Note 8. |
Show Radius of Curvature: |
This check box, if checked, will display colour coded radii of curvature if defined on the Vessel component. |
Input |
Description |
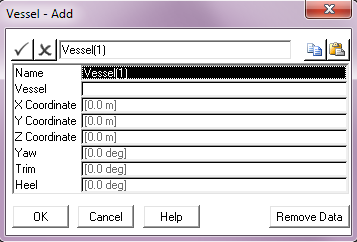
Name: |
The name of the vessel within the model. The default name is a combination of the Vessel component name and a number representing the number of these vessels already added to the model. |
Vessel: |
A drop-down list of all Vessel components defined in the project. It is used to select the Vessel component to be added to the model. |
X Coordinate: |
The distance of the vessel origin location from the mean water line in the global X (vertical) direction. Units: [m] or [ft] |
Y Coordinate: |
The global Y coordinate of the vessel origin location. Units: [m] or [ft] |
Z Coordinate: |
The global Z coordinate of the vessel origin location. Units: [m] or [ft] |
Yaw: |
The initial yaw angle of the vessel, measured anti-clockwise from the global Y-axis. The initial yaw angle defines the orientation of the local vessel axis system at the start of the analysis. The figure below shows the initial orientation of a local vessel axis system (xyz) relative to the global axis system (XYZ). The local x-axis corresponds to the vessel heave direction; the local y-axis corresponds to the vessel surge direction, while the local z-axis corresponds to the vessel sway direction. The initial vessel orientation is defined by the initial yaw angle, θ. It is assumed that the local heave axis is vertical in the vessel undisplaced position, so the initial orientation of the vessel axes is completely defined by the angle θ (which is measured anti-clockwise from the global Y-axis) as shown in the figure below. Units: [deg] |
Trim |
A trim or roll rotation to be applied to the vessel. Units: [deg] |
Heel |
A heel or pitch rotation to be applied to the vessel. Units: [deg] |

Initial Orientation of Vessel Axis System
Input |
Description |
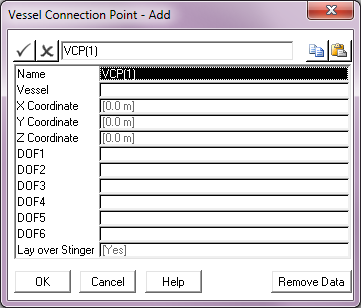
Name: |
The name of the vessel connection point. See Note (f). |
Vessel: |
A drop-down list of all the Vessel components defined in the project. It is used to select the vessel to which this connection point is attached. See Note (f). |
X Coordinate: |
The distance from the Vessel Origin to the connection point in the vessel local x direction. See Note (f). Units: [m] or [ft] |
Y Coordinate: |
The distance from the Vessel Origin to the connection point in the vessel local y direction. See Note (f). Units: [m] or [ft] |
Z Coordinate: |
The distance from the Vessel Origin to the connection point in the vessel local z direction. See Note (f). Units: [m] or [ft] |
DOF 1: |
The magnitude of the displacement (translation) to be applied at this connection in DOF 1, which is the vessel X (vertical) direction. By default no constraint is applied – the connection is free to translate in this DOF. See Notes (a) – (e) below. Units: [m] or [ft] |
DOF 2: |
The magnitude of the displacement (translation) to be applied at this connection in DOF 2, which is the vessel Y direction. By default no constraint is applied – the connection is free to translate in this DOF. See Notes (a) – (e) below. Units: [m] or [ft] |
DOF 3: |
The magnitude of the displacement (translation) to be applied at this connection in DOF 3, which is the vessel Z direction. By default no constraint is applied – the connection is free to translate in this DOF. See Notes (a) – (e) below. Units: [m] or [ft] |
DOF 4: |
The magnitude of the displacement (rotation) to be applied at this connection in DOF 4. By default no constraint is applied – the connection is free to rotate in this DOF. See Notes (a) – (e) below. Units: [deg] |
DOF 5: |
The magnitude of the displacement (rotation) to be applied at this connection in DOF 5. By default no constraint is applied – the connection is free to rotate in this DOF. See Notes (a) – (e) below. Units: [deg] |
DOF 6: |
The magnitude of the displacement (rotation) to be applied at this connection in DOF 6. By default no constraint is applied – the connection is free to rotate in this DOF. See Notes (a) – (e) below. Units: [deg] |
Lay over Stinger: |
A drop-down list that allows you to specify if components attached to this vessel connection point are supported by the vessel stinger. The options are Yes (the default) and No. See Note (f). |
a)In the PipeLay convention, a movement or displacement in the local vessel X (heave) direction is denoted a DOF 1 translation, a displacement in the local vessel Y (surge) is a DOF 2 translation, while DOF 3 is used for a translation in the local vessel Z (sway) direction. The rotational displacements about the local vessel axes are denoted DOFs 4-6 in PipeLay; the significance of these inputs is described in detail in the Technical Note 4.
b)You specify the nature of the constraint (boundary condition) applied at this connection via the DOF1-DOF6 entries. Note that you must explicitly input a value (typically a zero) into any degree of freedom which you wish to constrain – if you leave an input blank, no constraint is applied in that degree of freedom.
c)You can use the DOF1-DOF6 entries in any combination to define any general constraint. Two typical constraints you may wish to model include i) pinned or ii) fully fixed (‘built-in’). A pinned constraint is modelled by inputting zero in the first three boxes (DOF1-DOF3) while leaving DOF4-DOF6 blank. For a built-in connection on the other hand, all six terms are set to zero.
d)If you are defining displacements in DOFs 4-6 other than for a fully built-in condition, then you should understand the significance of these degrees of freedom and be clear that they do not in the most general case represent individual rotations about the local vessel axes. In particular, this means you should be wary of specifying only 1 or 2 rotation components (that is, 1 or 2 only of DOFs 4-6) where large rotations are involved, and you should only do so if you understand exactly the effect of what you are doing. Again you are referred to Technical Note 4 for a fuller discussion of this. It is important to emphasise though that in the overwhelming majority of analyses this is not an issue.
e)You can input a non-zero value for any DOF – in that case a constraint is applied in that DOF and the relevant displacement is applied as a static offset.
f)Often in PipeLay the user needs to connect a line directly to a tensioner location or to the most forward vessel support in a model. In order to do this a vessel connection point is needed with exactly the same coordinates as the point on the centreline of the pipe, which sits directly over the location of the relevant tensioner or support. The manual creation of such a vessel connection point is often tedious and can be error prone in the case of sloping tensioners or supports. With this in mind, the user interface automatically generates appropriate vessel connection points at all tensioner locations in the model as well as at the most forward vessel supports. Note that the Vessel Connection Points folder in the sub-component list is populated automatically with such connection points, as soon as a relevant vessel, with one or more tensioners, is added to the model. The Properties dialog for these automatic vessel connection points is similar in layout to any other vessel connection point. However it is not possible to edit the calculated coordinates and indeed the Name, as they will be directly linked to the associated tensioner. As well as this, the Lay over Stinger input is hardcoded to Yes.
| The coordinates for these generated vessel connection points are initially the same as those defined for the corresponding tensioner or support on the relevant Vessel component. However as soon as something is connected to these points, their X and Y coordinates are re-calculated as follows: |
▪X of Connection Point = X of Tensioner or Support + (Rc * CosΦt)
▪Y of Connection Point = Y of Tensioner or Support + (Rc * SinΦt)
| Note that Rc refers to the contact radius of the component attached to the vessel connection point, while Φt corresponds to the angle of the tensioner support whether it be input by the user or calculated by the interface. |
Input |
Description |
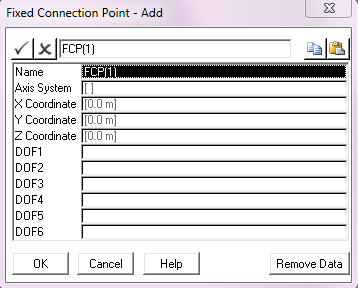
Name: |
The name of the fixed connection point. |
Axis System: |
A drop-down list of all the Axis System components defined in the project. It is used to select the axis system in which the boundary conditions at this connection point are to be applied. The default is <none>, in which case the global axis system is used in applying boundary conditions. |
X Coordinate: |
The global X coordinate of the fixed connection point. Units: [m] or [ft] |
Y Coordinate: |
The global Y coordinate of the fixed connection point. Units: [m] or [ft] |
Z Coordinate: |
The global Z coordinate of the fixed connection point. Units: [m] or [ft] |
DOF 1: |
The magnitude of the displacement (translation) to be applied at this connection in DOF 1, which is the global X (vertical) direction. By default no constraint is applied – the connection is free to translate in this DOF. See Notes (a) – (e) below. Units: [m] or [ft] |
DOF 2: |
The magnitude of the displacement (translation) to be applied at this connection in DOF 2, which is the global Y direction. By default no constraint is applied – the connection is free to translate in this DOF. See Notes (a) – (e) below. Units: [m] or [ft] |
DOF 3: |
The magnitude of the displacement (translation) to be applied at this connection in DOF 3, which is the global Z direction. By default no constraint is applied – the connection is free to translate in this DOF. See Notes (a) – (e) below. Units: [m] or [ft] |
DOF 4: |
The magnitude of the displacement (rotation) to be applied at this connection in DOF 4. By default no constraint is applied – the connection is free to rotate in this DOF. See Notes (a) – (e) below. Units: [deg] |
DOF 5: |
The magnitude of the displacement (rotation) to be applied at this connection in DOF 5. By default no constraint is applied – the connection is free to rotate in this DOF. See Notes (a) – (e) below. Units: [deg] |
DOF 6: |
The magnitude of the displacement (rotation) to be applied at this connection in DOF 6. By default no constraint is applied – the connection is free to rotate in this DOF. See Notes (a) – (e) below. Units: [deg] |
a)In the PipeLay convention, a movement or displacement in the global X (upward) direction is denoted a DOF 1 translation, a displacement in global Y (horizontal) is a DOF 2 translation, while DOF 3 is used for a translation in the globabl Z (lateral) direction. The rotational displacements about the global axes are denoted DOFs 4-6 in PipeLay; the significance of these inputs is described in detail in the Technical Note 4.
b)You specify the nature of the constraint (boundary condition) applied at this connection via the DOF1-DOF6 entries. Note that you must explicitly input a value (typically a zero) into any degree of freedom which you wish to constrain – if you leave an input blank, no constraint is applied in that degree of freedom.
c)You can use the DOF1-DOF6 entries in any combination to define any general constraint. Two typical constraints you may wish to model include i) pinned or ii) fully fixed (‘built-in’). A pinned constraint is modelled by inputting zero in the first three boxes (DOF1-DOF3) while leaving DOF4-DOF6 blank. For a built-in connection on the other hand, all six terms are set to zero.
d)If you are defining displacements in DOFs 4-6 other than for a fully built-in condition, then you should understand the significance of these degrees of freedom and be clear that they do not in the most general case represent individual rotations about the global axes. In particular, this means you should be wary of specifying only 1 or 2 rotation components (that is, 1 or 2 only of DOFs 4-6) where large rotations are involved, and you should only do so if you understand exactly the effect of what you are doing. Again you are referred to Technical Note 4 for a fuller discussion of this. It is important to emphasise though that in the overwhelming majority of analyses this is not an issue.
e)You can input a non-zero value for any DOF – in that case a constraint is applied in that DOF and the relevant displacement is applied as a static offset.
Input |
Description |
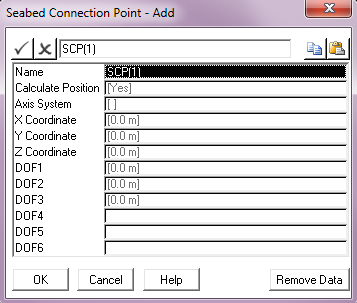
Name: |
The name of the seabed connection point. |
Calculate Position: |
A drop-down list that allows you to select whether or not you want PipeLay to automatically calculate the seabed connection point based on the rest of the model data. The options are Yes or No. The default is Yes, to automatically calculate the seabed connection point. If you select No, you must enter coordinates for the seabed connection point in the X Coordinate, Y Coordinate and Z Coordinate inputs. The most common reason to select No is to slightly modify the coordinates of a seabed connection point that PipeLay calculated. |
Axis System: |
A drop-down list of all the Axis System components defined in the project. It is used to select the axis system in which the boundary conditions at this connection point are to be applied. The default is <none>, in which case the global axis system is used in applying boundary conditions. |
X Coordinate: |
The global X coordinate of the seabed connection point. Units: [m] or [ft] |
Y Coordinate: |
The global Y coordinate of the seabed connection point. Units: [m] or [ft] |
Z Coordinate: |
The global Z coordinate of the seabed connection point. Units: [m] or [ft] |
DOF 1: |
The magnitude of the displacement (translation) to be applied at this connection in DOF 1, which is the global X (vertical) direction. The default value is 0. See Notes (a) – (e) in the ‘Fixed Connection Point – Add Dialog’ section. Units: [m] or [ft] |
DOF 2: |
The magnitude of the displacement (translation) to be applied at this connection in DOF 2, which is the global Y direction. The default value is 0. See Notes (a) – (e) in the ‘Fixed Connection Point – Add Dialog’ section. Units: [m] or [ft] |
DOF 3: |
The magnitude of the displacement (translation) to be applied at this connection in DOF 3, which is the global Z direction. The default value is 0. See Notes (a) – (e) in the ‘Fixed Connection Point – Add Dialog’ section. Units: [m] or [ft] |
DOF 4: |
The magnitude of the displacement (rotation) to be applied at this connection in DOF 4. By default no constraint is applied – the connection is free to rotate in this DOF. See Notes (a) – (e) in the ‘Fixed Connection Point – Add Dialog’ section. Units: [deg] |
DOF 5: |
The magnitude of the displacement (rotation) to be applied at this connection in DOF 5. By default no constraint is applied – the connection is free to rotate in this DOF. See Notes (a) – (e) in the ‘Fixed Connection Point – Add Dialog’ section. Units: [deg] |
DOF 6: |
The magnitude of the displacement (rotation) to be applied at this connection in DOF 6. By default no constraint is applied – the connection is free to rotate in this DOF. See Notes (a) – (e) in the ‘Fixed Connection Point – Add Dialog’ section. Units: [deg] |
Input |
Description |
Name: |
The name of the buoy within the model. The default name is a combination of the Buoy component name and a number representing the number of these buoys already added to the model. |
Buoy: |
A drop-down list of all Buoy components defined in the project. It is used to select the Buoy component to be added to the model. |
Notes:
(a)Note that, unlike a Vessel component for example, you are not required to specify any location for the Buoy component within the model. This is because the buoy is not immediately added at any specific location within the model, rather it becomes available for addition as it appears in the list of possible Start Point or End Point locations when adding a Line, Pipe Section or Cable component to the model. For simplicity, this point was omitted in previous discussions of Start Point or End Point inputs. If for example, you connect a Cable component between a Fixed Connection Point and a Buoy, the model schematic will automatically compute an appropriate location for the buoy, based on its submerged weight and the submerged weight of the attached cable.
Input |
Description |
Name: |
The name of the sheave within the model. The default name is a combination of the Sheave component name and a number representing the number of these sheaves already added to the model. |
Sheave: |
A drop-down list of all Sheave components defined in the project. It is used to select the Sheave component to be added to the model. |
X Coordinate: |
The global X coordinate of the sheave location. Units: [m] or [ft] |
Y Coordinate: |
The global Y coordinate of the sheave location. Units: [m] or [ft] |
Z Coordinate: |
The global Z coordinate of the sheave location. Units: [m] or [ft] |
Notes:
(a)The Sheave component relates specifically to the start-up via sheave analysis procedure. If you include a sheave and a return cable in your model, PipeLay automatically adjusts the length of the return cable such that the tension at the return side of the sheave is equal to the tension at the pipeline side times the sheave efficiency.
(b)Note that, like the Buoy component, the Sheave component also appears in the list of possible Start Point or End Point locations when adding a Line, Pipe Section or Cable component to the model. Again for simplicity, this point was omitted in previous discussions of Start Point or End Point inputs. However, the connection options for a Sheave component are slightly more complex than for a Buoy component, a Fixed Connection Point or a Vessel Connection Point. The sheave must be located at an intersection between a main line and a return cable, so two lines (or pipe sections or cables or any combination of these) must come together at a sheave. The Model component actually creates two coincident connection points for each sheave – one for the main line and one for the return cable. So you must designate a main line and a return cable in the model when you include a sheave.

Input |
Description |
Name: |
The name of the line within the model. The default name is a combination of the Line component name and a number representing the number of these lines already added to the model. |
Line: |
A drop-down list of all Line components defined in the project. It is used to select the Line component to be added to the model. |
Start Point: |
A drop-down list of all Fixed Connection and Vessel Connection points from which you select a start point for the line. The start point can also be <free>. If the Start Point or End Point is defined as <free> then no boundary conditions are applied at the specified end of the line. The initial configuration of the line is its static configuration under gravity and buoyancy loading. |
End Point: |
A drop-down list of all Fixed Connection and Vessel Connection points from which you select an end point for the line. The end point can also be <free>. See the description for Start Point above for more information. |
Internal Fluid: |
A drop-down list of all Internal Fluid components defined in the project. It is used to associate an internal fluid with the line. |
Sag Option: |
The method of calculating the sagbend and overbend regions. The options are Auto (the default), Manual, Guide and None. The Sag Option drop-down list allows you to specify where the transition between sagbend and overbend regions for the line occurs. Four options are provided, namely Auto (the default), Manual, Guide and None. If you choose the first option, PipeLay automatically determines the sagbend and overbend regions for you. This is based on the assumption that the curvature in the line changes sign going from overbend to sagbend (usually around the stinger tip region). If you choose Manual, you can manually specify the changeover point using the Sag Distance input (which is only enabled when Manual is selected). The Guide option means the changeover point is assumed to occur at the last (lowest) support on the stinger. Finally, selection of the last, None, option results in no definition of sagbend and overbend regions. The significance of the division into sagbend and overbend regions will become more apparent when you are working with the Analysis component. For example, you may wish to specify installation criteria (such as bending stress) for a particular region, or to monitor loads/stresses in the respective areas during postprocessing. |
Sag Distance: |
The curvilinear distance along the line to the intersection of the sagbend and overbend regions, measured from the start of the line. Units: [m] or [ft] |

Sagbend & Overbend Regions
Input |
Description |
Name: |
The name of the cable within the model. The default name is a combination of the Cable component name and a number representing the number of these cables already added to the model. |
Cable: |
A drop-down list of all Cable components defined in the project. It is used to select the Cable component to be added to the model. |
Start Point: |
A drop-down list of all Fixed Connection and Vessel Connection points from which you select a start point for the cable. The start point can also be <free>. If the Start Point or End Point is defined as <free> then no boundary conditions are applied at the specified end of the cable. The initial configuration of the cable is its static configuration under gravity and buoyancy loading. |
End Point: |
A drop-down list of all Fixed Connection and Vessel Connection points from which you select an end point for the cable. The end point can also be <free>. See the description for Start Point above for more information. |
Length: |
The length of the cable. Units: [m] or [ft] |
Input |
Description |
Name: |
The name of the pipe section within the model. The default name is a combination of the Pipe Section component name and a number representing the number of these pipe sections already added to the model. |
Pipe Section: |
A drop-down list of all Pipe Section components defined in the project. It is used to select the Pipe Section component to be added to the model. |
Start Point: |
A drop-down list of all Fixed Connection and Vessel Connection points from which you select a start point for the pipe section. The start point can also be <free>. If the Start Point or End Point is defined as <free> then no boundary conditions are applied at the specified end of the pipe section. The initial configuration of the pipe section is its static configuration under gravity and buoyancy loading. |
End Point: |
A drop-down list of all Fixed Connection and Vessel Connection points from which you select an end point for the pipe section. The end point can also be <free>. See the description for Start Point above for more information. |
Length: |
The length of the pipe section. Units: [m] or [ft] |
Internal Fluid: |
A drop-down list of all Internal Fluid components defined in the project. It is used to associate an internal fluid with the pipe section. |
Water depth dialog
Input |
Description |
Water Depth: |
The water depth. If you do not specify a water depth, PipeLay uses a default value of 100m or 100ft. Units: [m] or [ft] |

Input |
Description |
Schematic Solver Tolerance: |
The Model component uses a simplified spring-mass solver to enable it to continually calculate graphical representations of the model as it evolves. Sometimes the static configuration determined by the Model component may not be in line with expectations. In this situation, the Model component needs to allow the configuration to settle for a longer period of time in order to determine the true static configuration. To do this, you can reduce the value of this parameter. This may result in a better estimate of the true static configuration. Beyond a certain point, which is model dependant, reducing this parameter will have no further effect. The default value is 0.001. Under normal circumstances, you should not need to modify this parameter. |
Max Strain Iterations: |
The number of attempts the strain based calculation for the seabed connection point location can make. Defaults to 15. See Note (a). |
SCP Adjustment Increment: |
The amount by which the seabed connection point can be moved in each attempt. Defaults to 0.5. See Note (a). Units: [m] or [ft] |
Shallow Water Ratio: |
The ratio of stinger tip depth to water depth below which the strain based calculation for the seabed connection point is used. Defaults to 0.5. See Note (a). |
Strain Threshold: |
The target strain below which the governing sagbend strain must fall during the calculation of the seabed connection point. Defaults to 0.0025. See Note (a). |
Solver Contact Diameter |
A drop-down option for improving the robustness of certain models by providing the ability to assign a uniform initial contact diameter to every component over the vessel and stinger supports in the Model component. This uniform diameter can be based on a representative value for all component diameters along the vessel and stinger region, namely the Average, Weighted Average (accounting for relative component lengths), Minimum or Maximum. Note that the uniform diameter only relates to the Model as the actual individual component diameters take effect during static analysis. Such initial uniformity helps keep everything aligned prior to analysis, which in turn can improve stability in some circumstances. See Note (b). By default, each Individual contact diameter for the components is used. |
Notes:
(a)Typically when seabed connection point locations are calculated by the Model component they are based on ensuring that the angle of the attached pipeline as it leaves the stinger is approximately equal to the angle of the stinger tip itself. Such an approach is fine for deep and moderate water depths; however for shallow water scenarios this approach can result in the touchdown point being positioned too close to the vessel, which in turn induces significant bending and compression in the pipeline sagbend that may lead to convergence difficulties in the initial static analysis. To help overcome such problems, a second calculation method is available to the user. This method is based on ensuring that a certain threshold for bending strain is maintained in the pipeline sagbend when determining where to position the seabed connection point. A general outline of the alternative method is provided over the points below. These points are from the point of view of what the solver does in its calculation
1.Initially position the seabed connection point as per the typical calculation approach.
2.Decide if the alternative calculation method is needed by seeing if the ratio of the stinger tip depth to the water depth is below the defined Shallow Water Ratio. If it is then proceed with the new calculation steps. If it isn’t then just accept the initial position.
3.Approximate the governing bending strain in the pipeline sagbend and check if it exceeds the specified Strain Threshold. If it doesn’t then accept the seabed connection point position. If it does then more iteration steps are necessary.
4.Move the seabed connection point iteratively away from the vessel, using the SCP Adjustment Increment input while continually checking the governing strain. Repeat until either the Strain Threshold is achieved or the Max Strain Iterations is reached.
It is worth noting that the default values for the inputs in the Advanced Options dialog are sufficient for the majority of scenarios considered by PipeLay and so they should only need changing in certain circumstances.
(b)The use of a uniform contact diameter in the Model component is beneficial for scenarios where there are sudden changes in actual diameter across relatively short sections of the pipeline, for example in the area of flanges. If individual diameters are used in such scenarios then local jumps and stretches of the line profile appear at support locations in the Model and these in turn can lead to convergence difficulties, plus inaccuracies in the calculated section lengths. The use of a uniform diameter in these circumstances, in particular the Minimum one, helps keep all sections aligned in the Model initially before the actual diameters can take effect during the initial static analysis.
The significance of using a Minimum diameter is that all contact nodes are either resting on or below the support surfaces initially and so are pushed upwards statically during the initial analysis step when the actual larger diameters are introduced. This push up effect is more robust than having nodes fall down on contact surfaces during static analysis.