Properties Tab |


|
Properties Tab |
|
The main function of this tab is to choose the Model component for your analysis.
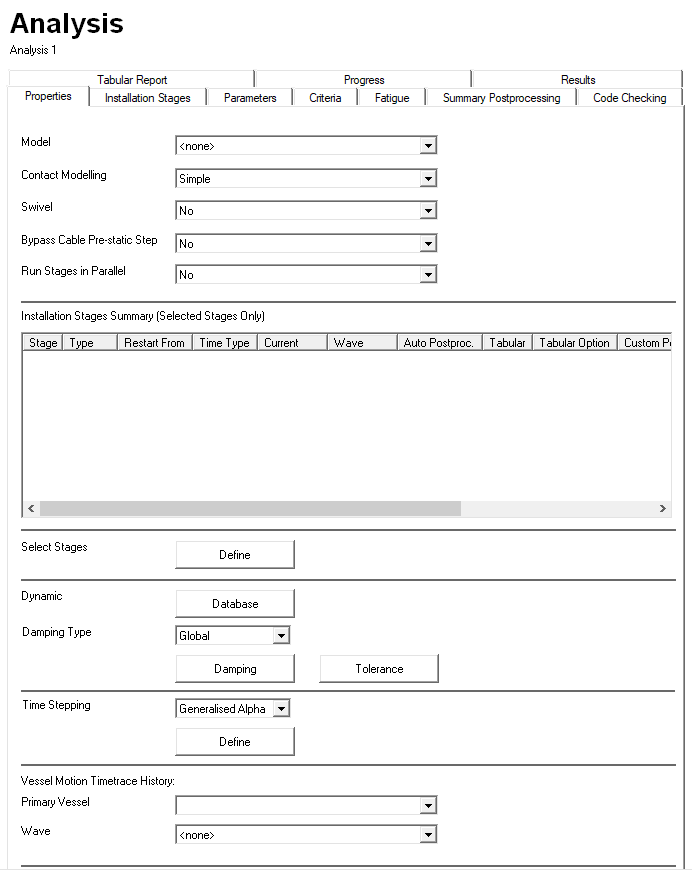
The Properties tab is divided into six sections as follows:
▪Model – This section allows you to select the installation stages that you want to include in your analysis. It is also used to nominate the contact modelling option to be used in all of the analysis stages defined in this component.
▪Installation Stages Summary – This section reflects the stages defined on the Installation Stages tab or those stages added/removed from this list using the Select Stages – Define button; this allows for a quick visual inspection.
▪Select Stages – This allows you to exclude/include some installation stages from the analysis.
▪Dynamic – This section is used to define data which will apply in all dynamic stages on this Analysis component.
▪Time Stepping - This section is used to specify the numerical damping applicable to all dynamic stages on this Analysis component.
▪Vessel Motion Timetrace History – This allows you to generate a time history of vessel motion.
An additional article provides information on the Properties Tab Best Practice.
Note
The contact modelling option is set to Simple and the swivel option is set to No in PipeLay Starter Edition
The topmost section of the tab provides three drop-down lists to define various model data. Clicking on the first, titled Model, brings up a list of all Model components in the project file from which you must select one as a necessary first step in defining an Analysis. The middle drop-down list, titled Contact Modelling, provides the following list of modelling options.

Contact Modelling Options
These options are discussed in Technical Note 5 - Contact Modelling Options, so that discussion is not repeated here. Whatever option you choose here is used in all of the analysis stages defined on the component; if you want to look at the effect of switching to a different contact model, you must use a different Analysis component.
The Bypass Cable Pre-Static Step drop-down list relates to the use of the program cable pre-static step. Many users will be aware that PipeLay has a preprocessing module based on the cable catenary equations which is used in the vast majority of analyses to provide a first approximation to the configuration of pipeline catenary sections (for example, from stinger tip to touchdown point) for the actual finite element engine. Invoking this cable pre-static module is automatic and requires no user intervention, and significantly improves solution stability. However in a very small number of analyses, typically in very shallow water, bypassing the cable pre-static step is necessary to achieve static convergence. Clicking on the Bypass Cable Pre-static Step drop-down list brings up two options, No (the default) and Yes. It must be stressed that this option is required only on very rare occasions.
The Run Stages in Parallel drop-down enables stages to be executed concurrently based on their dependency on restart stages. Non-restart stages will be executed first and then the stages depending on them will be executed once complete. This process repeats until all stages are completed successfully. The option is ignored if the analysis only contains a single stage or a single stage is selected for execution. The number of stages that can be executed is set on the Options dialog by editing the value in Concurrent Analysis Runs.
This section of the tab contains a Define button. You click on the Define button to display the Select Stages dialog, as shown in the figure below. This dialog allows you to specify whether you want to exclude or include some installation stages from the analysis and then you specify the stages that you want to exclude or include. You use a comma to separate the stage numbers or a dash to indicate a range of stages. For example, 1,2,3,6-10. Only the stages that you choose to include in the analysis are displayed in the Installation Stages Summary section of the Properties tab.

Select Stages Dialog
There are three data input dialogs in this section of the Properties tab. All are used to define data which will apply in all dynamic stages on this Analysis component. You use the Database dialog to adjust the level of database output from dynamic analyses. Since PipeLay automatically generates a sufficient level of output to carry out automated postprocessing, you will need to use this option only infrequently. As the figure below shows, the dialog offers control over database content and output times. Velocity & Acceleration are excluded from the motion database by default. Shear Force and Torque Moment are also excluded from the force database by default. These exclusions, combined with the control over the recording interval/time, are intended to keep the size of database files for long, typically random sea, dynamic runs from becoming excessively large.

The Damping Type drop-down enables you to select the method in which damping is applied. There are two options: Global and Component. This selects how damping is defined and changes which dialog is shown when the Damping button is clicked. Note that Global damping applies to all elements in the model whereas Component based damping applies only to the specified components.
Damping Type Options
The Global Damping dialog is displayed when the user has selected the Global damping type and is used to introduce mass and stiffness proportional damping into the dynamic equations of motion. The damping is specified in terms of mass and stiffness damping coefficients, as shown in the figure below.

Global Damping Dialog
The Component Damping dialog is displayed when the user has selected the Component damping type and is used to introduce mass and stiffness proportional damping into the dynamic equations of motion for specific components. The damping is specified in terms of mass and stiffness damping coefficients for the selected Component Type, Name and Location, as shown in the figure below. Note that Location only applies when the Line Component Type is selected.

Component Damping Dialog
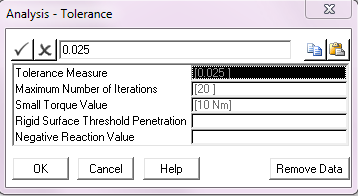
The Tolerance dialog allows you to vary certain parameters relating to the dynamic solution iteration procedure.
You should refer to the 'Properties Tab Best Practice' article for recommended specifications on the dialogs of the Dynamic section.
The Time Stepping section allows you to specify the type and the level of numerical damping applicable to all dynamic dynamic stages on this Analysis component. These settings apply to the entire model. You should only need to use this option infrequently. The Time Stepping drop-down enables you to select the method used to apply numerical damping. There are two options: Generalised Alpha and Hilber-Hughes. Selecting the Hilber-Hughes option disables the Define button. Generalised Alpha is the default option for PipeLay Version 3.5.1 and later, supplementing the Hilber-Hughes option found in earlier versions of PipeLay.

Time Stepping Options
The Generalised Alpha Dialog is used to define the desired level of numerical damping. The damping is specified in terms of a single coefficient.

Generalised Alpha Dialog
You should refer to the 'Properties Tab Best Practice' article for recommended specifications on the Time Stepping section.
The Vessel Motion Timetrace History option allows you to generate a time history of vessel motion, typically in response to a random sea, without having to perform a full analysis of a model that includes a pipeline, pipeline/stinger interaction etc. Before invoking this option, you need to select from the project file (i) the vessel of interest, and (ii) the wave of interest. Time histories are generated for all 6 vessel degrees of freedom and are available in both plot and text based format for inspection via the Results tab. The main purpose of this option is to allow you to identify the periods of maximum vessel response, so you can then perform dynamic analyses for periods of time centred on the maximum vessel response.
You select the vessel and wave of interest using the two drop-down lists at the bottom of the Properties tab. These present you with a list of all of the relevant components in the project file in the usual way. The vessel response is always simulated for a period of 3 hours, starting at 0s.
Please note that the text based output from this option is in such a format that it can be input directly into a Vessel Motion component, which uses Timetrace as the Motion Type.