Vessel Motion Data Inputs |


|
Vessel Motion Data Inputs |
|
Input |
Description |
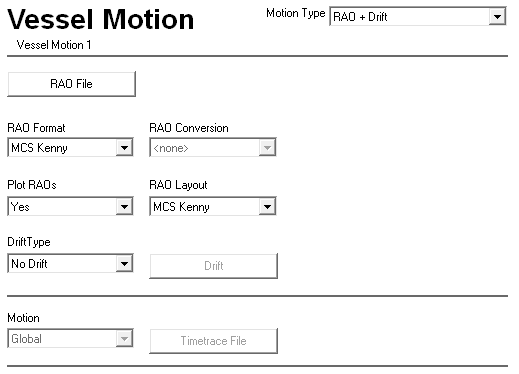
Motion Type: |
A drop-down list that allows you to select either of two options for specifying the vessel motions. Note that this drop-down list is disabled in PipeLay Starter Edition and the motion type is set to RAO + Drift. |
RAO file |
The name of the file containing the vessel RAOs. You get a standard Windows Open dialog when you invoke this, which you can use to browse for the location of your file. The format of the file is described in Note (a) below. |
RAO Format: |
A drop-down list that allows you to specify the format for specifying vessel RAOs. The options available are MCS Kenny or Custom. |
RAO Conversion: |
A drop-down list that allows you to select an RAO Conversion component from those already defined in the project. This drop-down list is only available if you select Custom from the RAO Format drop-down list. |
Plot RAOs: |
A drop-down list that allows you to specify whether or not an RAO report file containing plots of the vessel RAOs is required. If Yes is selected, the RAO report file will be generated when an analysis that references this Vessel Motion component is performed. |
RAO Layout: |
A drop-down list that allows you to specify the layout used for defining vessel RAOs in the RAO file. The layout can be either MCS Kenny (the default) or Line. See Note (c) below. |
Drift Type: |
A drop-down list that allows you to select whether or not the vessel undergoes second order (drift) motions, and the type of drift motions to be specified. The default is No Drift. If you select Sinusoidal or Timetrace, the Drift button is enabled. Note that this drop-down list is disabled in PipeLay Starter Edition and that the drift type is set to No Drift. |
Drift |
This button is available if you select Sinusoidal or Timetrace from the Drift Type drop-down list. If you select Sinusoidal and you click on the Drift button, the Vessel Motion – Sinusoidal Drift dialog is displayed. See the ‘Vessel Motion – Sinusoidal Drift Dialog’ section in this article for more information. If you select Timetrace and you click on the Drift button, a standard Windows Open dialog is displayed prompting you for the name of the file containing the timetrace of vessel drift motions. The format of the file is described in Note (e) below. Note that this button is disabled in PipeLay Starter Edition. |
Motion: |
A drop-down list that allows you to select whether the translational motions in the vessel motion timetrace file are relative to the global axis system (Global, the default) or to the initial yawed orientation of the vessel (Local). See Note (f) below. This option is only enabled if the vessel motion type is Timetrace. Note that this drop-down list is disabled in PipeLay Starter Edition. |
Timetrace File |
If you click on this button, a standard Windows Open dialog is displayed prompting you for the name of the file containing the timetrace of the combined (first and second order) vessel motions. The format of the file is described in Note (g) below. This button is only enabled if the vessel motion type is Timetrace. Note that this button is disabled in PipeLay Starter Edition. |
Note
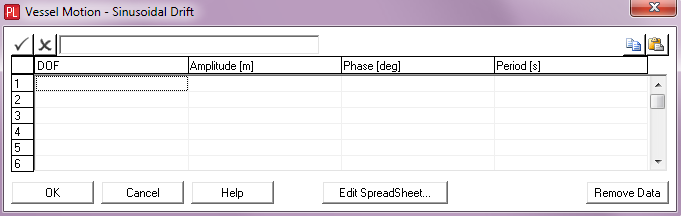
This dialog is not available in PipeLay Starter Edition
Input |
Description |
DOF: |
The degree of freedom (DOF) for this component of the drift motion. For translations, specify a value of 1 for the global X-axis, 2 for the global Y- axis or 3 for the global Z- axis. DOFs 4, 5 and 6 refer to the yaw, roll and pitch of the vessel respectively. See Note (d) below for further details. |
Amplitude: |
The amplitude of the sinusoidal drift motion. Units: [m] or [ft] |
Phase: |
The phase of the sinusoidal drift motion relative to the start of the analysis (time = 0). Units: [deg] |
Period: |
The period of the sinusoidal drift motion. Units: [seconds] |
Notes:

Vessel Degrees of Freedom & Local Vessel Axis System
The displacements and rotations defined by the vessel RAOs are always applied in the local vessel x̂ ŷ ẑ axis system. The instantaneous location and orientation of the local vessel axis system is defined by the vessel initial position (defined using the relevant Vessel component), and any drift motions that have been applied to the vessel (using the Vessel Motion component). The figure below shows how the initial vessel orientation and vessel drift motions are combined to give the instantaneous location of the vessel axis system.

Instantaneous Vessel Axes after Application of Drift
By default, PipeLay uses the standard Wood PLC format for vessel RAO files (see Note (c) below). In addition to this, however, the program also provides an RAO format conversion facility by means of the RAO Conversion component. This allows you to specify the format in which the data in the vessel RAO file is presented. This facility is invoked by selecting Custom (as opposed to MCS Kenny) from the RAO Format drop-down list on the Vessel Motion component, and then selecting the appropriate RAO Conversion component from the RAO Conversion drop-down list.
| (b) | In the standard Wood PLC RAO format, wave frequencies are specified in Hertz and the incident wave heading is defined as the angle between the direction of approach of a wave harmonic incident on the vessel and the local vessel surge (ŷ) axis. This is shown in the figure below, where θh is the incident wave heading. Note that you may, however, change both the units used for wave frequency and the definition of the incident wave heading using an RAO Conversion component. |

Definition of Wave Heading
One very important point to note is that in PipeLay all waves emanate from the origin. A number of examples of wave direction specification are shown in the 'Examples of Wave Direction Specification' figure below. When defining an RAO in terms of wave heading, it is important to ensure that the wave directions specified using any of the various wave specification options produce waves that are, in fact, incident on the vessel between the vessel heading values specified. Refer to the 'Wave Direction & Wave Heading' figure below, and the example RAO specification later.

Examples of Wave Direction Specification

Wave Direction & Wave Heading
It is important to be clear on the difference between wave direction and wave heading. Wave direction is the angle between the direction of wave advance and the global axis system; this remains constant throughout an analysis. You specify wave direction data when specifying other wave data, such as amplitude(s) and period(s). Wave direction data is independent of RAO data, because of course an analysis with waves included does not necessarily include vessel motions (although it would in most cases).
Wave heading on the other hand is a method of defining the direction of wave advance relative to a vessel axis system. As such, wave heading definition is intimately tied up with the specification and use of RAOs.
The standard Wood PLC RAO file format begins with a single line defining the incident wave heading at which the RAOs are being defined. This is followed by a block of three lines specifying the incident wave frequency and the relevant RAO amplitudes and phases for this heading and wave frequency, as shown below (note that entries shown below in italics should be replaced with their actual numeric values in the RAO file).

The block of three lines specifying the incident wave frequency and RAOs and phases is repeated as often as necessary until the RAOs are defined over the required range of wave frequencies. To define RAOs at more incident wave headings, you simply repeat the HEADING= line for the new wave heading, and the RAO data for this wave heading is specified as before. If RAOs are being defined for more than one incident wave heading, then they must also be defined for more than one frequency at each wave heading, and the number of frequencies at which the RAOs are defined should be the same for each heading. If the vessel RAOs are independent of the incident wave heading, then the HEADING= line should be omitted.
The Line RAO file format is essentially similar to the standard Wood PLC RAO file format, with the exception that the RAO and phase data for a particular heading and frequency appear on a single line, the format of which is shown below. Note that, for clarity, the data shown below is split over a number of lines, but should in reality be specified on a single line of the RAO file.
![]()
This line is repeated for every wave frequency and every wave heading for which RAOs are being defined. As with the Wood PLC RAO file format, if RAOs are being defined at more than one incident wave heading, then they must also be defined at more than one frequency at each wave heading, and the number of frequencies at which the RAOs are defined should be the same for each heading. So, for example, if RAOs were to be defined at three wave headings and ten frequencies per heading, then thirty lines of data would be required to specify the RAOs using the Line format. If the same wave heading is specified on all lines, then PipeLay assumes that the RAOs are independent of wave heading. Note also that the order in which the lines of RAO data appear is not important – PipeLay automatically sorts the RAO data by heading and frequency.
For either of the RAO file, formats numeric values may be separated by commas, spaces or tabs. Comment lines, denoted by a capital ‘C’ in the first column, are also permitted. PipeLay will ignore data on any such lines, allowing you to annotate the RAO file.
| (d) | PipeLay permits the specification of vessel drift in six degrees of freedom. The first three degrees of freedom, DOFs 1 – 3, correspond to translational drift in the global X, Y and Z directions respectively. The rotational degrees of freedom, however, are related to rotations in the local vessel x̂ ŷ ẑ axis system as follows. DOF 4, yaw, rotates the vessel and the local vessel axes about the vertical, or global X-axis. The 'Instantaneous Vessel Axes after Application of Drift' figure above shows the local vessel axis system after application of yaw drift. The instantaneous orientation of the yawed axes relative to the global axes is simply the sum of the initial yaw angle, θ, and the drift yaw, γD(t). DOFs 5 and 6 then correspond to roll and pitch rotations about the yawed ŷ-axis and ẑ-axis respectively. |
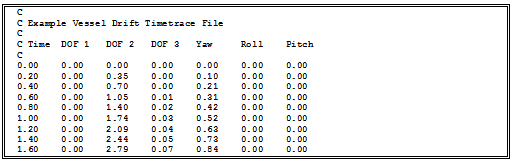
PipeLay uses cubic spline interpolation to find the values of drift in the six degrees of freedom at time points between those specified in the timetrace file (for this reason the analysis timesteps do not need to match those in the timetrace file). Timetrace drift motions are applied to the vessel in precisely the same way as sinusoidal drift motions (see Note (d) above). Note that for analysis times before the earliest time specified in the drift timetrace file, PipeLay uses the drift values specified for the earliest time. Similarly, for analysis times after the latest time in the timetrace file, PipeLay uses the drift values specified for the latest time.
| (f) | PipeLay provides two options for specifying the translational motions of the vessel in the combined (first and second order) vessel motion timetrace file. If Global is selected from the Motion drop-down list, then the DOF 1, 2 and 3 motions specified in the timetrace file (see Note (g) below) correspond to the global X, Y and Z directions respectively. |
If, on the other hand, Local is selected from the Motion drop-down list, then the DOF 1, 2 and 3 motions specified in the timetrace file correspond to the initial local vessel x-axis, y-axis and z-axis, respectively. In other words, the DOF 2 and 3 motions specified in the timetrace file will be in the direction of the initial vessel surge and sway axes (that is, the direction of the vessel surge and sway axes at the start of the analysis), respectively. DOF 1 motions specified in the timetrace file will always be in the vertical direction as the initial vessel heave axis is assumed to be vertical. Note that this option only affects the specification of DOF 1 – 3 motions; the rotational degrees of freedom (DOFs 4 – 6) remain unchanged. See also Note (g) below.
The vessel motion timetrace file is an ASCII data file that should contain seven columns of data. The first column contains time data, while the remaining six columns correspond to the six vessel degrees of freedom (see below). Note that the data for DOFs 1 – 3 should have units of either feet or metres (depending on the unit system in operation) and the data for DOFs 4 – 6 should have units of degrees. Comment lines, denoted by a capital ‘C’ in the first column are permitted, while lines that are completely blank are ignored. Columns of data may be separated by commas, spaces or tabs. An extract from a sample vessel motion timetrace file is shown below.
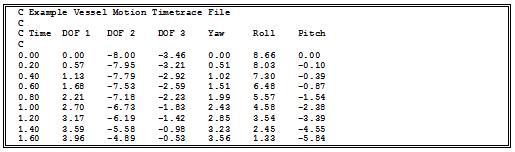
PipeLay uses cubic spline interpolation to find the vessel displacements and rotations at time points between those specified in the timetrace file (for this reason the analysis timesteps do not need to match those in the timetrace file). Note that for analysis times before the earliest time specified in the vessel motion timetrace file, PipeLay uses the values specified for the earliest time. Similarly, for analysis times after the latest time in the timetrace file, PipeLay uses the values specified for the latest time.
The data in the vessel motion timetrace file represents displacements and rotations from the location and orientation defined by the vessel initial position. The translational degrees of freedom (DOFs 1 – 3) represent displacements in either the global X, Y and Z directions or the initial local vessel x, y and z directions, depending on whether Global or Local is selected from the Motion drop-down list (see Note (f) above). The rotational degrees of freedom (DOFs 4 – 6) represent the vessel yaw, roll and pitch respectively. These rotations are applied in the same manner as the drift rotations. DOF 4, yaw, rotates the vessel and the local vessel axes about the vertical, or global X- axis, as shown in Figure 30.3 (above). DOFs 5 and 6 then correspond to roll and pitch rotations about the yawed ŷ-axis and ẑ-axis respectively.